 MÔ PHỎNG THỜI GIAN THỰC TRONG THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN/ĐIỀU CHỈNH
Nguyễn Phùng Quang, Bùi Quốc Khánh, Phùng Ngọc Lân
1.Giới thiệu nội dung
Mô phỏng là một phương pháp hay được sử dụng để nghiên cứu, phân tích đối tượng, chuẩn bị cho việc thiết kế hệ thống. Thực hiện mô phỏng sẽ giảm chi phí thiết kế chế tạo một sản phẩm mới, tránh được những sai lầm không đáng có khi ứng dụng thực tế. Một hạn chế của mô hình mô phỏng là không phản ánh được chính xác đối tượng theo thời gian thực. Vì vậy, thực hiện mô phỏng thời gian thực (MPTGT) là một bước vô cùng quan trọng, đặc biệt trong việc nghiên cứu các đối tượng có đáp ứng nhanh. Cơ sở thực hiện MPTGT là cài đặt phần cứng vào mạch vòng điều chỉnh của cấu trúc mô phỏng.
Bài báo sẽ trình bày các khái niệm về các bước thực hiện MPTGT, bản chất của nó, đồng thời sẽ giới thiệu công cụ Card DSP 1102 phục vụ cho MPTGT. Bài báo cũng giới thiệu một số kết quả bước đầu thuộc một ứng dụng đang được thực hiện tại Phòng thí nghiệm Tự động hóa, Đại học Bách khoa Hà nội, sử dụng Card DSP1102 để MPTGT hệ thống điều khiển / điều chỉnh máy phát điện chạy sức gió dùng máy điện dị bộ nguồn kép.
2.Mô phỏng thời gian thực trong thiết kế hệ thống
2.1 Quá trình thiết kế các hệ thống điều khiển/điều chỉnh hiện đại
 Việc sử dụng các thuật toán điều chỉnh (ĐC) phức tạp trong các hệ thống tự động hiện đại, có độ tích hợp cao, đã bắt buộc các nhà sản xuất phải tự động hoá quá trình thiết kế nhằm mục đích: rút ngắn thời gian phát triển và hạ giá thành thử nghiệm. Vì lý do ấy, máy tính đã thâm nhập vào hầu hết các bước của quá trình phát triển hệ thống, cho phép sớm phát hiện sai sót hoặc các yếu điểm của sản phẩm. Trọng tâm của nỗ lực trên là : Mô hình hoá và nhận dạng đối tượng điều khiển (ĐTĐK) thiết kế và mô phỏng khâu ĐC, thử nghiệm khâu ĐC trên ĐTĐK thực. Việc sử dụng các thuật toán điều chỉnh (ĐC) phức tạp trong các hệ thống tự động hiện đại, có độ tích hợp cao, đã bắt buộc các nhà sản xuất phải tự động hoá quá trình thiết kế nhằm mục đích: rút ngắn thời gian phát triển và hạ giá thành thử nghiệm. Vì lý do ấy, máy tính đã thâm nhập vào hầu hết các bước của quá trình phát triển hệ thống, cho phép sớm phát hiện sai sót hoặc các yếu điểm của sản phẩm. Trọng tâm của nỗ lực trên là : Mô hình hoá và nhận dạng đối tượng điều khiển (ĐTĐK) thiết kế và mô phỏng khâu ĐC, thử nghiệm khâu ĐC trên ĐTĐK thực.
 Xuất phát điểm của mọi phương pháp thiết kế với sự hỗ trợ của máy tính là mô hình toán của ĐTĐK, thực hiện trên máy tính. Mô hình đó cần phải mô tả đầy đủ các đặc điểm cơ bản của đối tượng. Ngoài ra, ta còn phân biệt giữa hai trường hợp: có sự tham gia của ĐTĐK thực (online) và không có sự tham gia ĐTĐK thực (Offline). Quá trình thiết kế, theo [3], có thể được tổng kết lại thành bốn bước như sau: Xuất phát điểm của mọi phương pháp thiết kế với sự hỗ trợ của máy tính là mô hình toán của ĐTĐK, thực hiện trên máy tính. Mô hình đó cần phải mô tả đầy đủ các đặc điểm cơ bản của đối tượng. Ngoài ra, ta còn phân biệt giữa hai trường hợp: có sự tham gia của ĐTĐK thực (online) và không có sự tham gia ĐTĐK thực (Offline). Quá trình thiết kế, theo [3], có thể được tổng kết lại thành bốn bước như sau:
a.Mô phỏng Offline
b.Control Prototyping
c.Software-in-the-loop
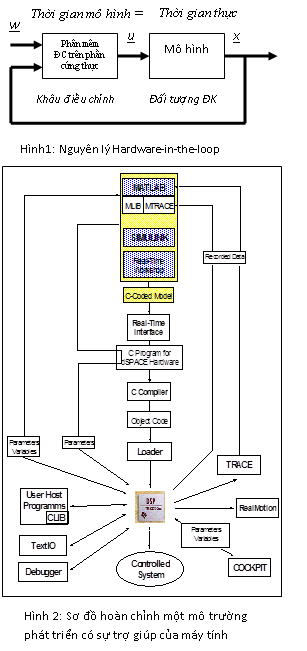
d.Hardware-in-the-loop
trong đó ba bước đầu tiên nhằm xây dựng được giải thuật, cấu trúc điều chỉnh. Bước cuối cùng thử nghiệm thiết bị, cấu trúc điều chỉnh được cài đặt trên phần cứng và thực hiện trên đối tượng ở dạng mô hình thời gian thực, có thể chạy trực tiếp ngay trên phần cứng ở trên.
Bước này không chỉ cho phép ta kiểm tra chức năng phần cứng, mà còn giúp ta đánh giá khả năng của phần mềm ĐC dưới điều kiện diễn biến thời gian sát với thực tế.
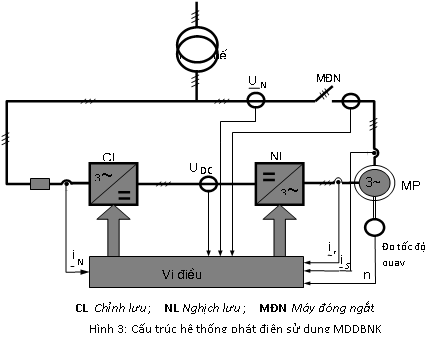
Hình 2 giới thiệu một môi trường thiết kế trên nền MATLAB-SIMULINK, kết hợp với phần cứng sử dụng DSP của hãng Texas Instruments.
Hình 2 chỉ rõ: kết hợp với MATLAB và các ToolBox, ta có thể mô phỏng Offline để bước đầu xác định tham số của thuật toán ĐC. Sau đó, khi đã bổ xung thêm các khối xuất/nhập dữ liệu (ví dụ DAC, ADC) vào sơ đồ mạch vòng cấu trúc DC, ta có thể sử dụng C-Compiler tạo mã C để nạp xuống Card, cài xen với hệ thống điều khiển phần mềm theo ngắt. Thư viện MLIB cung cấp các chức năng điều khiển phần cứng từ môi trường MATLAB(sử dụng Cockpit). Thư viện MTRACE có các chức năng giúp thu thập số liệu từ phần cứng.
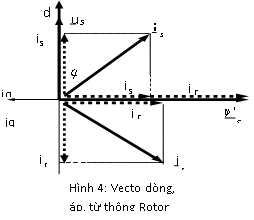
2.2 Hệ thống điều khiển máy phát điện chạy sức gió sử dụng máy điện dị bộ nguồn kép (MĐDBNK)
Hệ thống điều khiển / điều chỉnh máy phát điện chạy sức gió sử dụng MĐDBNK là một hệ thống phức tạp, gồm nhiều mạch vòng điều chỉnh và đối tượng có đáp ứng nhanh, vì thế quá trình thiết kế hệ thống điều chỉnh gặp nhiều khó khăn. Mục đích cuối cùng của quá trình thiết kế là hệ thống điều chỉnh sẽ chạy tốt trên Card Hardware với mô hình chạy theo thời gian thực cũng chạy trên Card đó.
2.2.1 Xây dựng mô hình MĐDBNK và hệ thống điều chỉnh trên nền MATLAB/SIMULINK
MĐDBNK xuất phát từ khả năng cấp nguồn từ cả phía rotor và stator, hoạt động với hệ số trượt trong một phạm vi khá rộng (tới ±30%), đem lại khả năng điều chỉnh dễ dàng dòng năng lượng qua máy phát (MP), chỉ nhờ biến tần có công suất bằng 1/3 công suất máy phát nhiều tác động lên vành góp rotor. Giải pháp điều khiển điều chỉnh hệ thống cho phép áp đặt nhanh hai giá trị mM và cos phi qua đó điều chỉnh công suất hữu công và công suất vô công. Hai thành phần dòng của Rotor ird và irq được sử dụng để áp đặt momen và hệ số công suất dựa trên các quan hệ
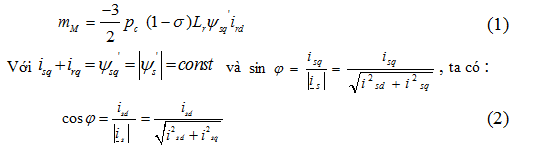
Hình 4 thể hiện các quan hệ này một cách trực quan hơn. Tương tự ta cũng tìm được đại lượng điều khiển công suất hữu công và công suất vô công phía lưới.
Mô hình liên tục của MĐDBNK được xây dựng dựa trên phương trình điện áp Rotor và Stator, cũng như phương trình momen của máy điện trên hệ toạ độ quay dq có trục thực tựa theo hướng của vector điện áp lưới.
Dựa trên mô hình liên tục của MĐDBNK, bằng cách tích phân trong một chu kỳ lấy mẫu, chúng ta có mô hình rời rạc. Giải pháp điều khiển phía máy phát được thực hiện nhờ việc thiết kế bộ điều chỉnh dòng, có nhiệm vụ áp đặt nhanh và cách ly được các thành phần d và q của dòng Rotor, qua đó áp đặt và cách ly được hai đại lượng mômen và hệ số công suất
Mô hình phía lưới điện được xây dựng dựa trên phương trình dòng áp ở đầu ra phía lưới của khâu chỉnh lưu. Hai thành phần d và q của vector điện áp đầu ra chỉnh lưu được sử dụng để áp đặt nhanh và cách ly được công suất hữu công và  . Mặt khác, điện áp một chiều trung gian cần được duy trì cố định. . Mặt khác, điện áp một chiều trung gian cần được duy trì cố định.
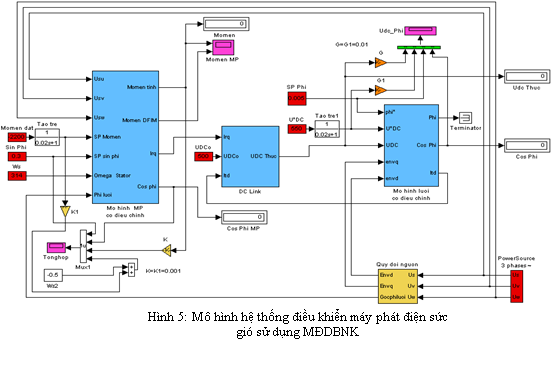
Dựa trên những kết quả tính toán lý thuyết, ta xây dựng được mô hình của hệ thống điều khiển điều chỉnh máy phát điện chạy sức gió và mô phỏng Offline trên nền Matlab/ Simulink như trên hình 5.
2.2.2 Xây dựng mô hình hệ thống, thực hiện mô phỏng thời gian thực trên Card DS1102
Trên thực tế, việc chuyển từ mô hình Offline đã được xây dựng trên nền Matlab/Simulink sang mô hình Realtime chạy được trên phần cứng không phải là một việc đơn giản, đặc biệt đối với hệ thống có cấu trúc phức tạp, nhiều vòng điều chỉnh như hệ thống trên. Môi trường Realtime chỉ chấp nhận các S-Function được viết bằng ngôn ngữ C tiêu chuẩn, tương thích với C compiler được cung cấp bởi nhà sản xuất Card. Chỉ riêng thao tác chuyển các block từ Built-in block thành các C-mex file đã làm tằng tốc độ mô phỏng lên đáng kể.
Bên cạnh đó, do tính chất đặc thù của hệ điều khiển số, đòi hỏi mô hình phải được xây dựng tương thích với chế độ làm việc với nhiều xung nhịp lấy mẫu - ví dụ các khâu điều chỉnh dòng có chu kỳ lấy mẫu 4ms, các khâu điều chỉnh vòng ngoài là 4ms - đã khiến cho người lập trình gặp rất nhiều khó khăn khi thực hiện mô phỏng Realtime.
2.3 Một số kết quả thực hiện mô phỏng Offline và Realtime
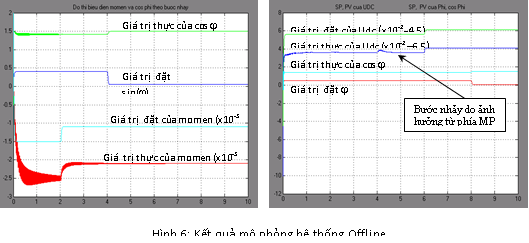
Ta thấy rõ ràng trên hình 6, khi gặp các bước nhảy về giá trị đặt của momen và phi, giải pháp điều chỉnh đã cách ly được hai quá trình điều khiển công suất hữu công và vô công.
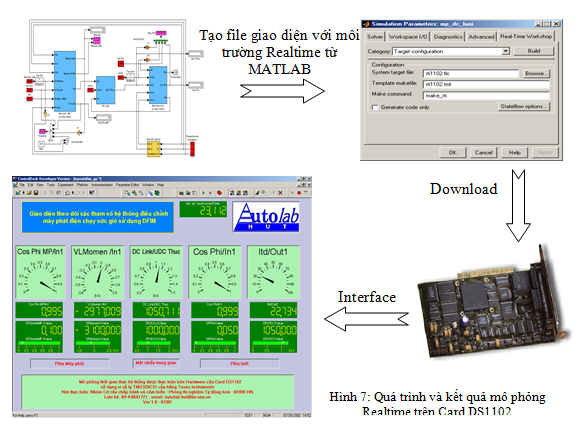
Hình 7 thể hiện layout của phần mềm ControlDesk cho phép người sử dụng tương tác với phần cứng Card DS1102. Thư viện công cụ hiển thị đa dạng của ControlDesk giúp cho người thiết kễ dễ dàng xây dựng các giao diện theo dõi quá trình mô phỏng, cung như cung cấp công cụ lưu trữ dữ liệu trong một khoảng thời gian hay tại một thời điểm nào đó.
Bên cạnh đó, một thư viện các I/O (ADC-DAC), interrupt và các đầu ra điều chế độ rộng xung PWM..., được tích hợp vào thư viện chung của Simulink, giúp người sử dụng dễ dàng xây dựng ứng dụng mô phỏng của mình.
3.Kết luận
Việc ứng dụng các công cụ Hardware hỗ trợ mô phỏng Realtime đối với các hệ thống phức tạp là một phần quan trọng trong cả quá trình thiết kế hệ thống. Mọi thuật toán phức tạp đều có thể được xử lý nhờ khả năng tích hợp các S-function viết bằng ngôn ngữ C là một thế mạnh, cho phép giải quyết được nhiều dạng bài toán khác nhau.
Ví dụ thực hiện mô phỏng Realtime hệ thống điều chỉnh hệ thống phát điện chạy sức gió sử dụng máy điện dị bộ nguồn kép là một minh chứng rất cụ thể. Kết quả giữa mô phỏng Offline trên Matlab và Realtime trên Card DSP đáp ứng được yêu cầu đề ra.
Một số vấn đề còn tồn tại sẽ được tiếp tục giải quyết như thực hiện mô phỏng quá trình hoà đồng bộ máy phát và lưới.
4.Tài liệu tham khảo
|
[1]
|
BÙI QUỐC KHÁNH, NGUYỄN VĂN LIỄN, NGUYỄN THỊ HIỀN, (1996), Truyền động điện, NXB KH và KT
|
|
[2]
|
NGUYỄN PHÙNG QUANG, (1996), Điều khiển tự động truyền động xoay chiều ba pha, NXB GD, Hà Nội
|
|
[3]
|
NGUYỄN PHÙNG QUANG, PHÙNG NGỌC LÂN, LÊ ANH TUẤN, (2000), Vi xử lý tín hiệu trong mô phỏng thời gian thực qua ví dụ điều chỉnh mức hệ thống ba bình thông nhau, TC TĐH NN 4-2001
|
|
[4]
|
PHÙNG NGỌC LÂN, NGUYỄN PHÙNG QUANG, (2001), Tổng hợp hệ thống điều khiển thiết bị phát điện chạy sức gió bằng máy điện dị bộ nguồn kép, kiểm chứng nguyên lý qua mô phỏng bằng Matlab/Simulink, Tuyển tập công trình khoa học phân ban điện, Hội nghị khoa học lần thứ 19, ĐHBK HN
|

|











